A Faculdade de Engenharia da Universidade do Porto (FEUP) recebeu no dia 17 de Novembro o Embaixador da Noruega, Anders Erdal, que se deslocou ao Porto com a sua comitiva, por ocasião do evento Business2Sea. Durante o encontro, o Laboratório de Sistemas e Tecnologia Subaquática (LSTS) da FEUP teve a oportunidade de dar a conhecer o trabalho desenvolvido na área dos veículos autónomos e de apresentar os resultados já alcançados ao nível do projeto Networked Ocean (NetOcean), financiado pelo EEA Grants.
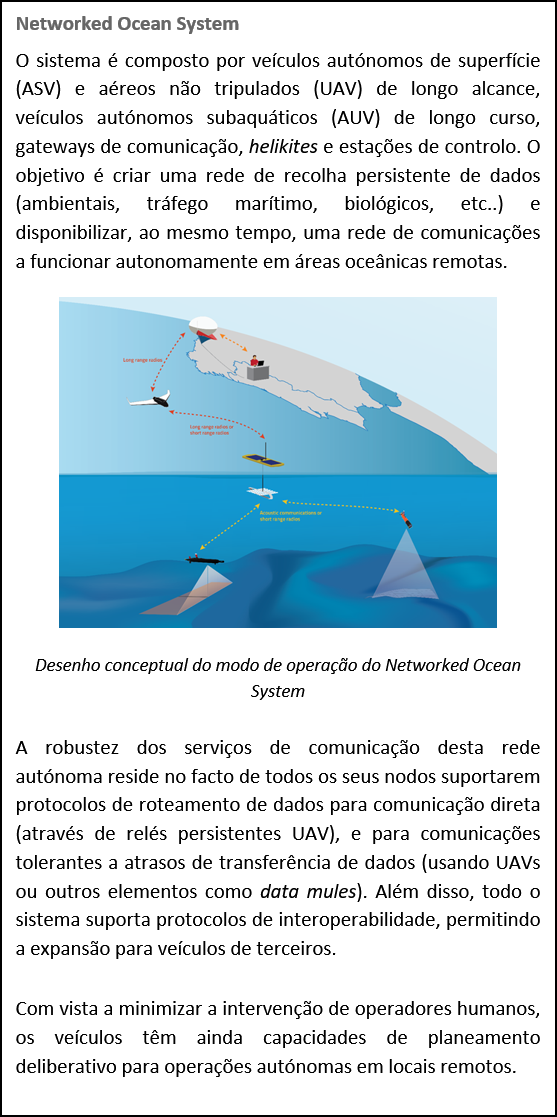
Esta visita ocorre numa fase de fortes interações com a Noruega, mantidas por parte do LSTS da FEUP no âmbito do NetOcean, com principal destaque para as operações marítimas levadas a cabo na costa norueguesa, ao longo das duas primeiras semanas de Setembro. O objetivo era realizar a demonstração do sistema desenvolvido pelo parceiros do projeto: LSTS-FEUP, Centro de Investigação Naval e Instituto Português do Mar e da Atmosfera. “Trata-se de um sistema composto por uma rede de veículos autónomos e destina-se a garantir a comunicação e recolha persistente de dados em áreas remotas”, explica João Sousa, docente da FEUP e investigador responsável pelo projeto.
O exercício na Noruega contou ainda com a participação do Centre for Autonomous Marine Operations and Systems – Norwegian University of Science and Technology (NTNU-AMOS), do KTH Royal Institute of Technology (KTH) e da Maritime Robotics AS (MR), os quais, juntamente com a Norwegian Defence Research Establishment – Division for Air and Space Systems (FFI), têm colaborado estreitamente nos resultados do projeto.
Conforme refere João Sousa, “A parceria atual Networked Ocean não é recente. Contudo, o projeto tem fomentado a visão partilhada entre os parceiros, de uma presença sustentável e persistente nos oceanos, passível de responder aos desafios levantados pelas suas autoridades nacionais”. Entre os resultados principais do projeto, salientam-se, assim, a aquisição de capacidades e know-how para operações sustentáveis e de custo reduzido nos oceanos Atlântico e Ártico e o modelo de cooperação estabelecido, que permite acelerar a aplicação de novos desenvolvimentos a ambientes de acção complexos.
Novos conceitos de Operação
A grande vantagem do sistema NetOcean é o facto dos seus elementos, quando subdivididos e analisados por proximidade relativa, formarem observatórios locais com capacidades de autonomia distribuída, aos quais os veículos se podem juntar ou abandonar. Estes observatórios locais têm as mesmas capacidades operacionais que a rede NetOcean como um todo, conseguindo funcionar de modo independente, em caso de quebra inesperada com a rede geral.
Com efeito, este sistema pode ser lançado numa área marítima remota e ajustar os seus parâmetros de forma deliberativa, à medida que elementos operacionais e/ou objetivos vão mudando no decorrer do processo. Este aspecto é fundamental para optimizar a utilização dos recursos disponíveis.
Além disso, os parâmetros do sistema especificam a forma como os componentes remotos comunicam e recolhem dados, visto ambas as funções estarem estrategicamente ligadas. “Por exemplo, os AUVs irão periodicamente sincronizar à superfície com outros elementos intervenientes”, explica Sérgio Ferreira, investigador do projetco, “de forma a tirar partido de payload de comunicações de longa distância, que existe especificamente a bordo destes elementos”. No entanto, são também utilizadas comunicações subaquáticas de baixa largura de banda, entre AUVs e os restantes elementos, caso a latência da informação transmitida não seja um pré-requisito.
Exercícios no Terreno
Os testes à operacionalidade do NetOcean têm sido divididos entre território nacional português e norueguês. Entre os vários exercícios, o grau de dificuldade e complexidade foi sendo progressivamente aumentado, com vista a avaliar os diferentes elementos do sistema, bem como a sua sinergia com a restante rede de comunicações que vai emergindo.
Os testes preliminares tiveram lugar em abril, na Noruega, onde foi possível verificar o funcionamento das primeiras integrações de rádios de longo alcance em UAVs da NTNU-AMOS. Esse passo permitiu efetuar voos iniciais e estabelecer comunicações, entre os diferentes nodos, a cerca de 5 km de distância do posto central de operações.
 UAVs da NTNU-AMOS, preparados com rádios MBR, prestes a efectuar voos de teste
UAVs da NTNU-AMOS, preparados com rádios MBR, prestes a efectuar voos de teste
Todas a gestão foi centralizada a bordo do navio Gunnerus, que serviu de hub principal às acções e à fusão de dados dos vários veículos autónomos, que integraram o exercício.
 Navio de pesquisa R/V Gunnerus pertencente à NTNU-AMOS
Navio de pesquisa R/V Gunnerus pertencente à NTNU-AMOS
Em Julho, o teatro de operações foi implementado em Portugal, durante o REP16 – Atlantic – exercício coorganizado pela Marinha Portuguesa e o LSTS-FEUP, em parceria com o NATO Centre for Maritime Research and Experimentation (CMRE). O REP16 – Atlantic contou com a participação de diversas instituições nacionais e estrangeiras, destacando-se, entre outras, a Marinha Belga, o SPAWAR (EUA) e as empresas OCEANSCAN e TELEDYNE, bem como observadores do Naval Undersea Warfare Center (EUA) da Marinha Americana, NASA-AMES (EUA), GEOMAR (GER) e a JPI Oceans. Neste contexto, foram efectuados os testes às implementações de software, concebidas na toolchain operacional dos veículos.
 Operações conjuntas entre veículos autónomos e tripulados durante REP16 – Atlantic
Operações conjuntas entre veículos autónomos e tripulados durante REP16 – Atlantic
Finalmente, as atividades regressaram em Setembro à Noruega, tendo-se repartido em várias zonas de operação: Slettvika, Brekstad e Trondheim. Ao longo de duas semanas, o foco foi consolidar o software desenvolvido e garantir a sua aplicação num ambiente o mais realista possível. Nesse sentido, foram concebidos exercícios multidisciplinares, para colocar em prática as diferentes vertentes do NetOcean e garantir a sua avaliação quanto às questões da comunicação de longo alcance, mas também da capacidade de recolha/difusão e utilização de dados dentro da mesma rede.
Durante a primeira semana, os testes foram realizados de modo individual, sendo a avaliação feita incrementalmente às capacidades da toolchain de software, com exercícios de levantamento batimétrico de costa e exercícios de interação com rede de telecomunicações 3G/4G.
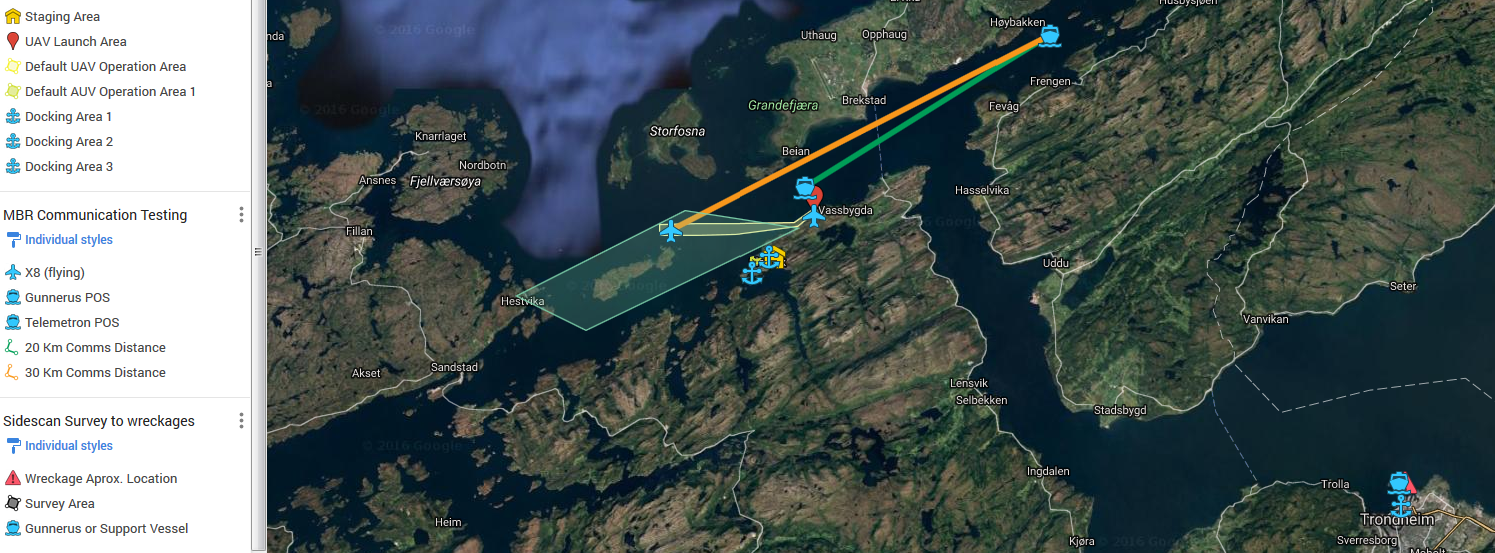 Mapa geral das zonas de operação NetOcean durante Setembro 2016
Mapa geral das zonas de operação NetOcean durante Setembro 2016
Paralelamente, foram ainda adicionados ao sistema veículos autónomos da KTH, bem como veículos de superfície da MR, convertidos para funcionamento autónomo.
Com todos os elementos a postos, a segunda semana arrancou com um simulacro de rastreio de animais marinhos, através de posicionamento acústico. No fim, o êxito alcançado pelas operações corroborou as capacidades do sistema, em manter uma rede de comunicações robusta, e confirmou a sua eficácia na operação simultânea e coordenada de vários veículos autónomos, em ambiente remoto.
 AUV “Explorer-1” da FEUP-LSTS juntamente com ASV “Anka” da KTH (esquerda). ASV convertido “Telemetron” da MR com dispositivo para lançamento autónomo de AUV (direita)
AUV “Explorer-1” da FEUP-LSTS juntamente com ASV “Anka” da KTH (esquerda). ASV convertido “Telemetron” da MR com dispositivo para lançamento autónomo de AUV (direita)